Unterbrechen und Fortsetzen von Bewegungen
Das beschriebene Beispielprojekt Robotics_Interrupt_Continue.project ist im Installationsverzeichnis von CODESYS unter ..\CODESYS SoftMotion\Examples zu finden.
Dieses Beispiel zeigt, wie kommandierte Bewegungen mit dem Funktionsbaustein SMC_GroupInterrupt unterbrochen und zu einem späteren Zeitpunkt mit dem Funktionsbaustein SMC_GroupContinue fortgesetzt werden können. Zwischen Unterbrechen und Fortsetzen kann die Achsgruppe beliebige Bewegungen ausführen.
Aufbau der Applikation
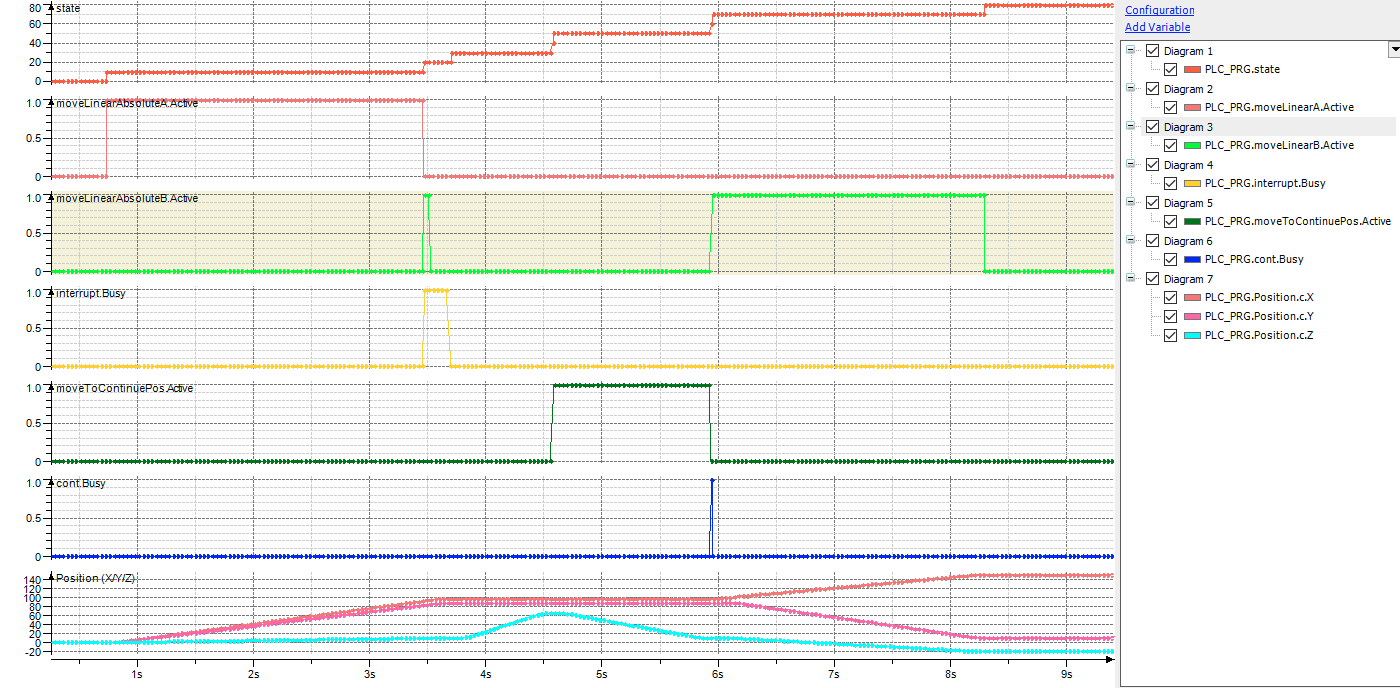
Die Applikation besteht aus einer einfachen Zustandsmaschine im Programm PLC_PRG und einem Trace, mit dem die Zustandsübergänge nachvollzogen werden können.
Zuerst werden die Achsen und die Achsgruppe eingeschaltet. (
STATE_POWER_ON)Danach werden zwei Bewegungen,
moveLinearAundmoveLinearB, mit Überschleifen kommandiert. (STATE_START_MOVING)Sobald die zweite Bewegung aktiv wird, also wenn das Überschleifen beginnt, wird die Bewegung unterbrochen. Ursache könnte zum Beispiel sein, dass ein Defekt an einem Werkzeug festgestellt wurde. (
STATE_INTERRUPT)Es wird eine relative PTP-Bewegung in positiver Z-Richtung ausgeführt, zum Beispiel um nach dem Defekt das Werkzeug auszutauschen. (
STATE_INTERMEDIATE_MOVEMENT)Vor dem Fortsetzen wird wieder zurück auf die Position gefahren, an der die ursprüngliche Bewegung unterbrochen wurde. (
STATE_GET_CONTINUE_POS/STATE_MOVE_TO_CONTINUE_POS)Die ursprüngliche Bewegung wird fortgesetzt. (
STATE_CONTINUE)
Verwendung
Übersetzen Sie das erstellte Programm und loggen Sie sich ein. Um die verschiedenen Stati nachzuvollziehen, können Sie den Trace auf die Steuerung laden. Starten Sie die Applikation.